
AIM: The main objective of this project Shared Steering Control between Driver and an Automation to avoid Accidents when the driver is in fatigue State is to develop an embedded system, which is used follow a line and also giving a buzzer while any obstacle comes in the way.
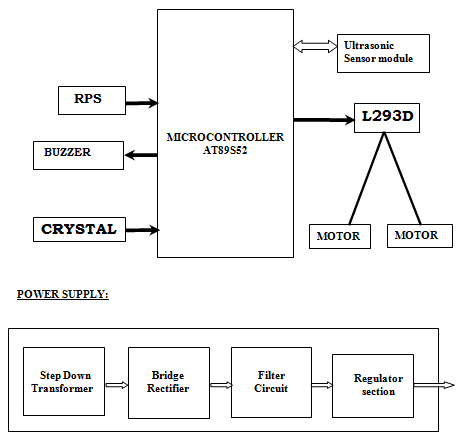
IMPLEMENTATION: This Shared Steering Control between Driver and an Automation to avoid Accidents project is implemented 8051 based At89s52 developed board interfaced with Photosensors, ultrasonic sensor, H-Bridge driver, and motors.
BLOCK DIAGRAM & POWER SUPPLY:
DESCRIPTION: A car is having many capabilities. The car will do any number of tasks according to the program done by the controller inside. It seems a useless thing if it is uncontrollable. Here controlling a car is the main task has to consider while the driver is in fatigue state.
The car Platform employs two DC motors for the drive. In this project, the car will be followed a line up to the tracking object meanwhile any obstacle comes it will give a buzzer sound. After removing the obstacle it follows the line normally.
Since car Platform is equipped with two motors for the drive, controlling the motors, i.e. when making a right turn, the right wheel can be stopped i.e. power to the DC motor is switched off. The left wheel is driven i.e. left DC motor is on. This causes the system to take a right turn. Similarly for a left turn.
The detector circuitry consists of the ultrasonic integrated detection module. The detector houses the emitter as well as a detector. The detectors are positioned accurately either side of the line. They are placed such that they are just out of the line.
SOFTWARE:
Embedded ‘C’
RIDE to write code
ISP to burn the chip
HARDWARE:
At89s52 based our own developed board
Power Supply
Photosensors
H-Bridge driver
Robotic platform
Ultrasonic sensor
ADVANTAGES: Low cost, automated operation, Low Power consumption.
REFERENCES
1. The 8051 microcontroller and embedded systems by Mazidi.
2. www.wikipedia.org
3. WWW.atmel.com
4. www.8051projects.com
5. Embedded systems with 8051 by kenith j ayala
send this project to my mail id
send this project
Pls forward me this project
Please forward me this project