
Abstract:
The Solar based garbage cleaning robot with time slot arrangement advanced ECE & EEE project provides the clear description of solar-based cleaning system which can clean the places with respective time slots.
This robot does not require any power from external sources it takes the solar power to actuate the robot. (i.e., If you want to clean a place twice a day then you just need to fix the time at which the robot need to clean).
Firstly the controller will have the path of the places that need to be cleaned. Then it starts the cleaning procedure. Once all the paths are travelled by the robot then it goes to its original position. Robot collects the garbage in its front claws and carries them to dump area at its respective position.
Block Diagram:
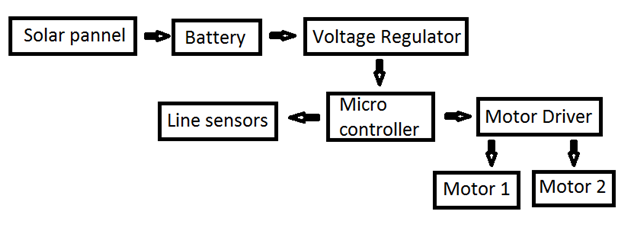
What will your project do?
This is a solar based garbage collecting robot with time slot management, in the current day every individual life is becoming very busy and people don’t like to spend time in throwing garbage safely, so we have come up with a new mechanism like every house will have garbage hanger in defined place.
The robot will travel every day on one particular time slot which is assigned by the user. This robot has a record of where the garbage bags are located, this robot comes to that particular place by line tracking and pulls the garbage bag into its bin, and likewise, it will collect the all houses garbage.
What is the new for this project?
There is no such product in the market.
This project is automatic runs without human interaction, it has solar panel to charge the Battery and it works with time slot management.
What is the current status?
Sir as of now we have ideated the project and designed the plan on paper, we will soon design the robot in solid works and then we will go for fabrication.
We have made research on what motors we have to use, what should be the size of the robot.
Components used?
Robot body will be fabricated on MS sheet metal.
BLDC motors are used for driving the robot forward. (Specifications = 12V BLDC motor, torque = 2kgcms).
A small 2 DOF robotic arm will be used for picking the garbage bags.